












ให้คำปรึกษาด้านผลิตภัณฑ์
ที่อยู่อีเมลของคุณจะไม่ถูกเผยแพร่ ช่องที่ต้องกรอกถูกทำเครื่องหมายไว้ *


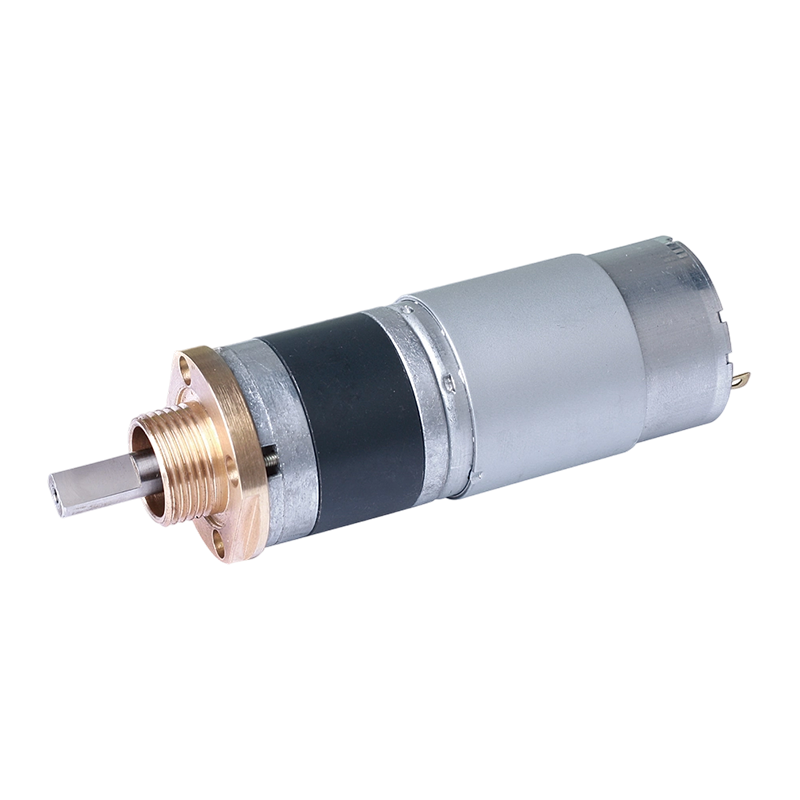
มอเตอร์เกียร์กระแสตรงคือมอเตอร์ไฟฟ้ากระแสตรงที่จับคู่กับกระปุกเกียร์แบบกลไกในยูนิตเดียวที่รวมเข้าด้วยกัน ตัวมอเตอร์หมุนเร็ว ซึ่งมักจะอยู่ที่ 3,000 ถึง 15,000 รอบต่อนาทีที่แรงดันไฟฟ้าที่กำหนด แต่การใช้งานจริงส่วนใหญ่ต้องการการเคลื่อนไหวที่ช้าและควบคุมได้พร้อมแรงหมุนที่มาก กล่องเกียร์จะแก้ปัญหานี้ด้วยการแลกเปลี่ยนความเร็วกับแรงบิดผ่านชุดเฟืองแบบตาข่าย ผลลัพธ์ที่ได้คือเพลาเอาท์พุตที่หมุนช้ากว่าโรเตอร์ของมอเตอร์มาก แต่มีแรงบิดที่เพลาสูงกว่าตามสัดส่วน
หากไม่มีกระปุกเกียร์ มอเตอร์กระแสตรงขนาดเล็กสามารถหมุนใบพัดลมได้อย่างง่ายดาย แต่ประสบปัญหาในการยกของหนัก ขับสายพานลำเลียง หรือหมุนวาล์ว ด้วยการลดเกียร์ที่ 100:1 มอเตอร์แบบเดียวกับที่สร้างแรงบิดฟรีรันนิ่ง 5 mN·m ตอนนี้ส่งประมาณ 500 mN·m ที่เอาท์พุต ลบการสูญเสียจากแรงเสียดทานของตาข่ายเกียร์ โดยทั่วไป 5–20% ขึ้นอยู่กับประเภทเกียร์และการหล่อลื่น การเพิ่มแรงบิดนั้น รวมกับการรวมมอเตอร์และกระปุกเกียร์เข้าด้วยกันอย่างกะทัดรัดเป็นชิ้นเดียว จึงเป็นเหตุให้มอเตอร์เกียร์กระแสตรงเป็นหนึ่งในส่วนประกอบการเคลื่อนไหวที่ระบุอย่างกว้างขวางที่สุดในการใช้งานทางอุตสาหกรรม เชิงพาณิชย์ และผู้บริโภค
การออกแบบกระปุกเกียร์มีผลกระทบต่อประสิทธิภาพ ขนาด ประสิทธิภาพ และเสียงรบกวนมากกว่าตัวแปรการออกแบบอื่นๆ เกือบทั้งหมด การกำหนดค่าสี่แบบครองตลาด
เฟืองเดือยมีฟันตรงตัดขนานกับแกนเพลา เป็นประเภทเกียร์ที่ง่ายที่สุดและมีราคาแพงที่สุดในการผลิต ซึ่งทำให้มอเตอร์กระแสตรงเฟืองตรงเป็นตัวเลือกเริ่มต้นสำหรับการใช้งานที่คำนึงถึงต้นทุน จุดอ่อนหลักคือเสียงรบกวน เนื่องจากความกว้างของฟันทั้งหมดสัมผัสพร้อมกันที่หน้าสัมผัสตาข่ายแต่ละอัน เฟืองเดือยจึงส่งเสียงกระทบที่มีลักษณะเฉพาะที่ความเร็วสูง ประสิทธิภาพอยู่ในเกณฑ์ดี โดยทั่วไปแล้วจะอยู่ที่ 95–98% ต่อสเตจ และสามารถรองรับโหลดในแนวรัศมีปานกลางได้ดี มอเตอร์เกียร์เดือยพบได้ทั่วไปในเครื่องพิมพ์ ของเล่น ตู้จำหน่ายสินค้าอัตโนมัติ และแอคทูเอเตอร์สำหรับงานเบา ซึ่งการทำงานที่เงียบไม่ใช่เรื่องสำคัญ
กระปุกเกียร์ดาวเคราะห์จะจัดเรียงเฟือง "ดาวเคราะห์" หลายชุดรอบเฟือง "ดวงอาทิตย์" ที่อยู่ตรงกลาง ซึ่งทั้งหมดบรรจุอยู่ภายในเฟืองวงแหวน เนื่องจากโหลดถูกใช้ร่วมกันกับเฟืองแพลนเน็ตหลายตัวพร้อมๆ กัน มอเตอร์เฟือง DC ของดาวเคราะห์จึงให้ความหนาแน่นของแรงบิดที่สูงมากในแพ็คเกจโคแอกเชียลขนาดกะทัดรัด เพลาเอาท์พุตอยู่ในแนวเดียวกับเพลามอเตอร์ ซึ่งช่วยให้การติดตั้งในพื้นที่จำกัดทำได้ง่ายขึ้น กระปุกเกียร์ดาวเคราะห์มีความแข็งและแม่นยำกว่าประเภทเดือยหรือหนอน ทำให้เป็นตัวเลือกที่ต้องการสำหรับหุ่นยนต์ ยานพาหนะนำทางอัตโนมัติ (AGV) ไขควงไฟฟ้า และการใช้งานใดๆ ที่ต้องการแรงบิดสูง ความแม่นยำของตำแหน่งที่แคบ และอายุการใช้งานที่ยาวนาน ข้อเสียคือต้นทุน: กล่องเกียร์ของดาวเคราะห์มีราคาแพงกว่าในการผลิตมากกว่าเดือยหรือขดลวดที่ระดับแรงบิดเท่ากันอย่างเห็นได้ชัด
กล่องเกียร์ตัวหนอนใช้เพลาตัวหนอนที่มีลักษณะคล้ายสกรูซึ่งประกบกับล้อตัวหนอนที่มุม 90 องศา การกำหนดค่านี้ทำให้ได้อัตราส่วนการลดที่สูงมากในขั้นตอนเดียว — โดยทั่วไปคือ 5:1 ถึง 100:1 — และให้คุณลักษณะการล็อคตัวเองตามธรรมชาติ: เมื่อมอเตอร์หยุดทำงาน โหลดจะไม่สามารถขับเคลื่อนเกียร์ถอยหลังได้ ทำให้มอเตอร์กระแสตรงเฟืองตัวหนอนเหมาะสำหรับการใช้งานที่โหลดต้องอยู่ในตำแหน่งที่ไม่มีไฟฟ้าใช้ เช่น ที่เปิดประตูโรงรถ ลิฟต์ยกเวที แอคชูเอเตอร์เตียงในโรงพยาบาล และแผงกั้นเพื่อความปลอดภัย ข้อจำกัดหลักคือประสิทธิภาพ: แรงเสียดทานของตาข่ายเฟืองตัวหนอนสูง โดยประสิทธิภาพขั้นตอนเดียวโดยทั่วไปอยู่ระหว่าง 50–90% ขึ้นอยู่กับมุมนำ โดยอัตราส่วนที่สูงขึ้นจะมีประสิทธิภาพน้อยลงเรื่อยๆ มอเตอร์เฟืองตัวหนอนยังผลิตความร้อนอย่างมากภายใต้รอบการทำงานที่มีโหลดสูงอย่างต่อเนื่อง
เฟืองเกลียวจะมีฟันตัดทำมุมกับแกนเพลา ดังนั้นการสัมผัสกันระหว่างฟันจึงค่อยเป็นค่อยไปและก้าวหน้ามากกว่าจะเกิดขึ้นทันที สิ่งนี้จะช่วยลดเสียงรบกวนและการสั่นสะเทือนได้อย่างมากเมื่อเทียบกับเฟืองตรง และเพิ่มความสามารถในการรับน้ำหนักได้เล็กน้อยเนื่องจากพื้นที่หน้าสัมผัสที่มีประสิทธิภาพขนาดใหญ่ขึ้น มอเตอร์เกียร์ DC แบบเฮลิคอลเป็นเรื่องปกติในการใช้งานที่ต้องการการทำงานที่เงียบกว่า เช่น ตัวขับเคลื่อนสายพานลำเลียง เครื่องจักรบรรจุภัณฑ์ และอุปกรณ์ทางการแพทย์ การผสมผสานระหว่างเฮลิคอลและเอียงทำให้เพลาเอาท์พุตเอียงกับมอเตอร์ได้ 90 องศา คล้ายกับเฟืองตัวหนอนแต่มีประสิทธิภาพสูงกว่า (โดยทั่วไปคือ 94–97% ต่อสเตจ) แรงขับในแนวแกนที่เพิ่มขึ้นซึ่งเกิดจากตาข่ายเฟืองเกลียวต้องใช้ตลับลูกปืนที่สามารถรองรับโหลดนี้ได้ ซึ่งจะเพิ่มต้นทุนต่อหน่วยเล็กน้อย
องค์ประกอบของมอเตอร์กระแสตรงนั้นมีสถาปัตยกรรมพื้นฐานสองแบบ และการเลือกใช้สถาปัตยกรรมเหล่านี้ส่งผลต่อต้นทุน ข้อกำหนดในการบำรุงรักษา ช่วงความเร็ว และอายุการใช้งานอย่างมาก
| คุณสมบัติ | มอเตอร์เกียร์ DC แบบแปรงถ่าน | มอเตอร์เกียร์กระแสตรงไร้แปรงถ่าน (BLDC) |
| วิธีการเปลี่ยน | เครื่องกล (สับเปลี่ยนแปรงคาร์บอน) | อิเล็กทรอนิกส์ (ESC หรือไดรเวอร์มอเตอร์) |
| อายุการใช้งานโดยทั่วไป | 500–3,000 ชั่วโมง (จำกัดการสึกหรอของแปรง) | 10,000–20,000 ชั่วโมง |
| ความซับซ้อนในการควบคุม | แบบธรรมดา — แรงดันไฟฟ้าหรือ PWM โดยตรง | ต้องใช้ไดรเวอร์ BLDC/ESC โดยเฉพาะ |
| ประสิทธิภาพ | โดยทั่วไป 75–85% | โดยทั่วไป 85–95% |
| เสียงรบกวนและอีเอ็มไอ | สูงกว่า (แปรงโค้งสร้าง EMI) | ล่าง |
| ต้นทุนต่อหน่วย | ล่าง | สูงกว่า (ตัวขับมอเตอร์) |
| การใช้งานทั่วไป | ของเล่น เครื่องใช้ไฟฟ้า ระบบแสงอัตโนมัติ | หุ่นยนต์, AGV, อุปกรณ์ทางการแพทย์, EV |
สำหรับการสร้างต้นแบบหรือการใช้งานที่ไม่ต่อเนื่องสำหรับงานต่ำ มอเตอร์เกียร์ DC แบบแปรงถ่านที่ขับเคลื่อนด้วยสะพาน H L298N หรือ TB6612FNG แบบธรรมดาเป็นเส้นทางที่เร็วและถูกที่สุดในการไปสู่ระบบการทำงาน สำหรับทุกสิ่งที่ทำงานอย่างต่อเนื่อง ทำงานในสภาพแวดล้อมที่รุนแรง หรือต้องใช้งานภาคสนามเป็นเวลาหลายปีโดยไม่ต้องบำรุงรักษา มอเตอร์เกียร์ DC แบบไร้แปรงถ่าน แม้จะมีค่าใช้จ่ายล่วงหน้าที่สูงกว่าและอุปกรณ์อิเล็กทรอนิกส์สำหรับไดรเวอร์เพิ่มเติม มักจะให้ต้นทุนรวมในการเป็นเจ้าของที่ดีกว่าเสมอ
เอกสารข้อมูลมอเตอร์เกียร์กระแสตรงอาจมีความหนาแน่นสูง แต่พารามิเตอร์ห้าตัวจะกำหนดว่ามอเตอร์จะทำงานในการใช้งานของคุณหรือไม่ การทำความเข้าใจแต่ละรายการจะช่วยป้องกันข้อผิดพลาดในการเลือกที่พบบ่อยที่สุด
มอเตอร์เกียร์กระแสตรง ได้รับการออกแบบมาสำหรับแรงดันไฟฟ้าที่จ่ายโดยเฉพาะ — โดยทั่วไปคือ 6V, 12V, 24V หรือ 48V ในการใช้งานทางอุตสาหกรรมและงานอดิเรก การใช้งานมอเตอร์ที่สูงกว่าแรงดันไฟฟ้าที่กำหนดอย่างมากจะเร่งการสึกหรอของแปรงในประเภทแปรง ทำให้ขดลวดร้อนเกินไป และทำให้อายุการใช้งานของตลับลูกปืนสั้นลง การทำงานที่ต่ำกว่าแรงดันไฟฟ้าที่กำหนดจะช่วยลดแรงบิดที่มีอยู่ และอาจทำให้มอเตอร์หยุดทำงานภายใต้ภาระ สำหรับระบบที่ใช้พลังงานจากแบตเตอรี่ ให้จับคู่แรงดันไฟฟ้าที่กำหนดของมอเตอร์กับแรงดันไฟฟ้าของชุดแบตเตอรี่ที่ระบุที่การชาร์จระดับกลาง ไม่ใช่การชาร์จเต็ม เพื่อหลีกเลี่ยงแรงดันไฟฟ้าเกินที่ด้านบนของรอบการชาร์จ มอเตอร์เกียร์ 12V DC ทำงานจาก 3S LiPo (12.6V) ที่ชาร์จใหม่นั้นเป็นที่ยอมรับได้เล็กน้อย การรันจากแพ็ค 4S (16.8V) จะทำลายมันอย่างรวดเร็ว
ความเร็วรอบเปล่าคือ RPM ของเพลาเอาท์พุต เมื่อมอเตอร์ทำงานที่แรงดันไฟฟ้าที่กำหนดโดยมีแรงบิดเป็นศูนย์ ภายใต้โหลดจริง ความเร็วจะลดลง — โดยทั่วไป 10–20% ที่แรงบิดพิกัด (ต่อเนื่อง) และสูงสุดถึง 50% ที่แรงบิดแผงลอยสูงสุด เมื่อคำนวณว่ามอเตอร์เกียร์กระแสตรงสามารถเคลื่อนโหลดที่ความเร็วที่ต้องการได้หรือไม่ ให้ใช้ความเร็วโหลดที่จุดทำงานของแรงบิดที่คาดหวังเสมอ ไม่ใช่ตัวเลขที่ไม่มีโหลด ผู้ผลิตบางครั้งระบุเฉพาะความเร็วรอบขณะไม่มีโหลดและแรงบิดแผงลอยเท่านั้น จุดปฏิบัติการที่รับน้ำหนักตกอยู่ประมาณกึ่งกลางของเส้นโค้งความเร็ว-แรงบิด
แรงบิดพิกัด (หรือที่เรียกว่าแรงบิดต่อเนื่อง) คือแรงบิดสูงสุดที่มอเตอร์สามารถส่งได้ไม่จำกัดโดยไม่มีความร้อนสูงเกินไป แรงบิดแผงลอยคือแรงบิดสูงสุดที่เกิดขึ้นเมื่อเพลาถูกยึดอยู่กับที่ โดยทั่วไปจะเป็น 5–10 เท่าของแรงบิดพิกัดสำหรับมอเตอร์เกียร์ DC แบบมีแปรงถ่าน แรงบิดของแผงลอยมีประโยชน์สำหรับการปรับขนาดโหลดสูงสุดเป็นระยะๆ (เช่น แรงที่จำเป็นในการทำให้วาล์วที่ติดอยู่หลุดออก) แต่การทำงานอย่างต่อเนื่องที่แผงลอยหรือใกล้แผงลอยจะทำให้มอเตอร์ร้อนเกินไปอย่างรวดเร็ว เลือกมอเตอร์ที่มีแรงบิดพิกัดสูงกว่าแรงบิดโหลดต่อเนื่องที่คาดไว้ของการใช้งานของคุณอย่างน้อย 20–30% อัตราความปลอดภัยนี้คำนึงถึงความแปรผันของแรงเสียดทาน แรงดันไฟฟ้าตก และการลดอุณหภูมิ
อัตราทดเกียร์จะแสดงจำนวนรอบการหมุนของเพลามอเตอร์ที่ทำให้เกิดการหมุนรอบเพลาเอาท์พุตหนึ่งครั้ง อัตราส่วน 50:1 หมายความว่าเอาต์พุตจะเปลี่ยนหนึ่งครั้งต่อการหมุนมอเตอร์ทุกๆ 50 รอบ อัตราทดเกียร์ที่สูงขึ้นจะทำให้ความเร็วเอาต์พุตลดลงและแรงบิดเอาต์พุตที่สูงขึ้น อย่างไรก็ตาม อัตราส่วนที่สูงมากจะทำให้ระยะเกียร์มากขึ้น ซึ่งจะเพิ่มการสูญเสียแรงเสียดทานและระยะฟันเฟือง ซึ่งเป็นระยะฟรีเพลย์เล็กน้อยในเพลาเอาท์พุตเมื่อทิศทางกลับกัน สำหรับการใช้งานการกำหนดตำแหน่ง ฟันเฟืองเป็นข้อกำหนดที่สำคัญ: โดยปกติแล้วกระปุกเกียร์ดาวเคราะห์จะมีระยะฟันเฟือง 0.5–3 อาร์คนาทีในเกรดที่แม่นยำ ในขณะที่กระปุกเกียร์เดือยแบบประหยัดอาจมีฟันเฟือง 1–5 องศา ซึ่งเป็นที่ยอมรับไม่ได้สำหรับสิ่งใดที่ต้องการการวางตำแหน่งซ้ำ
รอบการทำงาน อธิบายเปอร์เซ็นต์ของเวลาที่มอเตอร์ทำงานเทียบกับพักภายในรอบระยะเวลาที่กำหนด มอเตอร์ที่ได้รับการจัดอันดับสำหรับ S1 (หน้าที่ต่อเนื่อง) สามารถทำงานได้อย่างไม่มีกำหนดที่โหลดที่กำหนดโดยไม่มีความร้อนสูงเกินไป อัตรา S2 (หน้าที่ระยะสั้น) และ S3 (หน้าที่เป็นระยะไม่ต่อเนื่อง) ช่วยให้ระดับกำลังสูงสุดสูงขึ้น เนื่องจากมอเตอร์เย็นลงในช่วงปิดเครื่อง จับคู่พิกัดหน้าที่ของมอเตอร์กับรอบการทำงานจริงของคุณเสมอ — มอเตอร์พิกัดสำหรับรอบหน้าที่ 30% จะร้อนเกินไปและไม่ทำงานหากทำงานอย่างต่อเนื่อง แม้ว่าแรงบิดและความเร็วจะอยู่ภายในขีดจำกัดป้ายชื่อก็ตาม
การเลือกแรงดันไฟฟ้ามักขับเคลื่อนโดยแหล่งพลังงานที่มีอยู่มากกว่าตามความชอบของมอเตอร์ แต่การทำความเข้าใจกรณีการใช้งานทั่วไปสำหรับแรงดันไฟฟ้าแต่ละระดับจะช่วยให้ตัวเลือกของคุณแคบลงได้อย่างรวดเร็ว
การเลือกมอเตอร์ให้ถูกต้องในครั้งแรกช่วยหลีกเลี่ยงการออกแบบใหม่และความล้มเหลวในสนาม ปฏิบัติตามกรอบการปฏิบัตินี้:
คำนวณแรงบิดที่แอปพลิเคชันของคุณต้องการที่เพลาเอาท์พุต สำหรับหุ่นยนต์มีล้อ นี่หมายถึงการคำนวณแรงที่จำเป็นในการเร่งความเร็วมวลของหุ่นยนต์ เอาชนะแรงเสียดทานจากการหมุน และไต่ระดับความลาดเอียงใดๆ ที่คาดหวังในการทำงาน สำหรับตัวกระตุ้นเชิงเส้น ให้คำนวณแรงบนลีดสกรูและแปลงเป็นแรงบิดของมอเตอร์ผ่านลีดและประสิทธิภาพของสกรู เพิ่มส่วนต่างด้านความปลอดภัย 25–50% เพื่อพิจารณาถึงความแปรผันของแรงเสียดทาน อายุ และสถานการณ์การโหลดที่เลวร้ายที่สุด หมายเลขแรงบิดเป้าหมายนี้ — เมื่อใช้ระยะขอบ — จะกลายเป็นข้อกำหนดแรงบิดพิกัดต่ำสุดของคุณ
กำหนดความเร็วเพลาเอาท์พุตขั้นต่ำและสูงสุดที่แอพพลิเคชันของคุณต้องการ สายพานลำเลียงที่เคลื่อนย้ายผลิตภัณฑ์ด้วยความเร็ว 0.5 ม./วินาที ด้วยลูกกลิ้งขับเคลื่อนเส้นผ่านศูนย์กลาง 50 มม. ต้องใช้ความเร็วเอาต์พุตประมาณ 191 RPM (0.5 / (π × 0.05) × 60) เลือกมอเตอร์ที่มีความเร็วรอบเปล่าสูงกว่าความเร็วโหลดที่ต้องการอย่างน้อย 15–20% เพื่อให้แน่ใจว่ามอเตอร์จะไม่ทำงานใกล้แผงลอยในสภาวะปกติ
ใช้คู่มือการตัดสินใจต่อไปนี้เพื่อจับคู่ประเภทกระปุกเกียร์ให้ตรงกับข้อกำหนดการใช้งาน:
ตรวจสอบว่าแหล่งจ่ายไฟของคุณสามารถจ่ายกระแสไฟสูงสุดของมอเตอร์ที่แผงลอยได้ กระแสไฟฟฉาสำหรับมอเตอร์เกียร์ DC แบบมีแปรงถ่านโดยทั่วไปจะอยู่ที่ 5–10 เท่าของกระแสไฟไม่มีโหลด หากแหล่งจ่ายของคุณไม่สามารถจ่ายกระแสไฟนี้ชั่วคราวในระหว่างสตาร์ทหรือสภาวะติดขัด ให้เพิ่มตัวขับมอเตอร์จำกัดกระแสพร้อมขีดจำกัดกระแสที่ปรับได้ หรือเลือกตัวขับมอเตอร์ที่มีพื้นที่ด้านบนเพียงพอ สำหรับมอเตอร์เกียร์ DC แบบไร้แปรงถ่าน ให้ยืนยันว่าอัตรากระแสต่อเนื่องและจุดสูงสุดของไดรเวอร์ BLDC เกินความต้องการของมอเตอร์โดยมีอัตรากำไรขั้นต้นอย่างน้อย 20%
มอเตอร์เกียร์กระแสตรงมาตรฐานไม่ได้ปิดผนึก หากมอเตอร์ต้องเผชิญกับฝุ่น ความชื้น น้ำหล่อเย็นที่กระเซ็น หรือสภาวะการชะล้าง ให้ระบุหน่วยที่ได้รับการจัดอันดับ IP — IP54 สำหรับการป้องกันฝุ่นและการกระเซ็น, IP65 หรือ IP67 สำหรับสภาพแวดล้อมที่มีความต้องการมากขึ้น สำหรับการแปรรูปอาหาร ยา หรือการใช้งานทางทะเล โปรดยืนยันว่าน้ำมันหล่อลื่นกระปุกเกียร์เป็นไปตามข้อกำหนดด้านกฎระเบียบที่เกี่ยวข้อง (เช่น จาระบีเกรดอาหาร NSF H1 สำหรับบริเวณที่สัมผัสกับอาหาร เป็นต้น) ช่วงอุณหภูมิในการทำงานก็มีความสำคัญเช่นกัน มอเตอร์มาตรฐานได้รับการจัดอันดับสำหรับอุณหภูมิแวดล้อม 0–40°C; สำหรับคลังสินค้าห้องเย็นหรือการติดตั้งกลางแจ้งในสภาพอากาศทางตอนเหนือ ให้ยืนยันข้อกำหนดจาระบีอุณหภูมิต่ำและพิกัดอุณหภูมิของขดลวด
มอเตอร์เกียร์กระแสตรงปรากฏในผลิตภัณฑ์และระบบที่หลากหลาย การทำความเข้าใจว่ามักใช้ที่ไหนจะช่วยระบุการออกแบบอ้างอิงที่เหมาะสมและการกำหนดค่าที่ได้รับการตรวจสอบแล้ว
| อุตสาหกรรม | ใบสมัคร | ประเภทมอเตอร์เกียร์ทั่วไป |
| หุ่นยนต์และ AGV | ล้อขับเคลื่อน การกระตุ้นข้อต่อ กลไกของมือจับ | ดาวเคราะห์ไร้แปรงถ่าน 24V–48V |
| ระบบอัตโนมัติทางอุตสาหกรรม | สายพานลำเลียง ตารางกำหนดดัชนี แอคทูเอเตอร์วาล์ว | ขดลวด หนอน หรือดาวเคราะห์ 24V |
| อุปกรณ์การแพทย์ | ปั๊มแช่ เครื่องมือผ่าตัด เตียงในโรงพยาบาล | ดาวเคราะห์ไร้แปรงถ่าน ฟันเฟืองต่ำ 12V–24V |
| ยานยนต์ | กระจกไฟฟ้า, ตัวปรับที่นั่ง, ไดรฟ์ซันรูฟ | หนอนหรือเดือยปัดเงา 12V |
| เครื่องใช้ไฟฟ้า | การแพน/เอียงกล้อง ตัวกระตุ้นบ้านอัจฉริยะ เครื่องพิมพ์ | เดือยแปรง 5V–12V |
| เกษตรกรรม | การควบคุมวาล์วชลประทาน กลไกการเพาะเมล็ด | หนอนหรือดาวเคราะห์ที่ได้รับการจัดอันดับ IP 12V–24V |
| ระบบอัตโนมัติในอาคาร | แดมเปอร์ HVAC, แอคทูเอเตอร์แบบตาบอด, ระบบขับเคลื่อนประตู | ขดลวดหรือหนอนไร้แปรงถ่าน 24V |
มอเตอร์เกียร์กระแสตรงเหมาะอย่างยิ่งกับการทำงานที่ความเร็วหลายระดับ เนื่องจากความเร็วของมอเตอร์กระแสตรงเป็นสัดส่วนโดยตรงกับแรงดันไฟฟ้าที่ใช้ ในทางปฏิบัติ ความเร็วจะถูกควบคุมโดยวิธีใดวิธีหนึ่งจากสามวิธี
PWM เป็นวิธีมาตรฐานในการควบคุมมอเตอร์เกียร์ DC แบบมีแปรงถ่านจากไมโครคอนโทรลเลอร์, PLC และไอซีไดรเวอร์มอเตอร์ ไดรเวอร์จะเปิดและปิดแหล่งจ่ายไฟของมอเตอร์ด้วยความถี่คงที่ โดยทั่วไปคือ 1–20 kHz และรอบการทำงาน (เปอร์เซ็นต์ของเวลาที่แหล่งจ่ายไฟเปิดอยู่) จะเป็นตัวกำหนดแรงดันไฟฟ้าเฉลี่ยและความเร็ว รอบการทำงาน 50% ที่ 12V ให้พลังงานประมาณ 6V เทียบเท่ากับมอเตอร์ การควบคุม PWM มีประสิทธิภาพเนื่องจากทรานซิสเตอร์สวิตชิ่งใช้เวลาส่วนใหญ่ในการเปิดหรือปิดอย่างเต็มที่ เพื่อลดการสูญเสียความต้านทาน ความถี่ PWM ที่ต่ำกว่า 1 kHz อาจทำให้มอเตอร์ได้ยินเสียงสะอื้นเนื่องจากขดลวดกระดองสั่นที่ความถี่สวิตชิ่ง ความถี่ที่สูงกว่า 20 kHz จะส่งผลให้ค่านี้อยู่เหนือช่วงเสียง สำหรับมอเตอร์เกียร์ DC แบบมีแปรงถ่าน ความถี่ PWM ที่ 10–20 kHz เป็นตัวเลือกที่ใช้งานได้จริง
สำหรับการใช้งานที่ต้องการความเร็วที่แม่นยำและสม่ำเสมอโดยไม่คำนึงถึงการเปลี่ยนแปลงของโหลด — แพลตฟอร์มหุ่นยนต์ เทปไดรฟ์ การจ่ายที่แม่นยำ — ตัวเข้ารหัสแบบหมุนที่ติดตั้งบนเพลามอเตอร์หรือเอาต์พุตกระปุกเกียร์จะให้การตอบสนองความเร็วแบบเรียลไทม์ไปยังตัวควบคุม PID ตัวควบคุมจะเปรียบเทียบความเร็วจริงกับค่าที่ตั้งไว้ และปรับรอบการทำงานของ PWM เพื่อชดเชย ตัวเข้ารหัสสำหรับมอเตอร์เกียร์ DC โดยทั่วไปจะเป็นประเภทเอฟเฟกต์ฮอลล์ออพติคอลหรือแม่เหล็กแบบสี่เหลี่ยมจัตุรัส โดยมีความละเอียดตั้งแต่ 6 ถึงหลายพันจำนวนต่อการปฏิวัติ ขึ้นอยู่กับข้อกำหนดด้านความแม่นยำ ซัพพลายเออร์มอเตอร์เกียร์กระแสตรงหลายรายเสนอตัวเลือกตัวเข้ารหัสในตัวเป็นรายการแค็ตตาล็อกมาตรฐาน ซึ่งช่วยให้การรวมฮาร์ดแวร์ง่ายขึ้นอย่างมาก
ในระบบธรรมดาที่โหลดค่อนข้างคงที่และความแม่นยำของความเร็วไม่สำคัญ สามารถตั้งค่าความเร็วได้โดยการปรับแรงดันไฟฟ้าของแหล่งจ่ายด้วยแหล่งจ่ายไฟ DC แบบแปรผันหรือตัวควบคุมแรงดันไฟฟ้าเชิงเส้น แนวทางนี้มีประสิทธิภาพน้อยที่สุด โดยตัวควบคุมเชิงเส้นจะกระจายแรงดันไฟฟ้าที่ตกคร่อมเป็นความร้อน และไม่มีการชดเชยโหลด แต่เป็นการใช้งานที่ง่ายที่สุดและเหมาะสมกับม้านั่งทดสอบ การปรับความเร็วด้วยตนเอง และการใช้งานที่ใช้พลังงานต่ำมาก โดยไม่ต้องกังวลเรื่องการกระจายความร้อนในตัวควบคุม
การทำความเข้าใจว่าอะไรเป็นสาเหตุที่ทำให้มอเตอร์เกียร์กระแสตรงทำงานล้มเหลวในที่สุดจะช่วยให้คุณออกแบบระบบที่ขยายระยะเวลาการบริการและตรวจจับปัญหาก่อนที่จะทำให้เกิดการหยุดทำงานโดยไม่ได้วางแผนไว้
ที่อยู่อีเมลของคุณจะไม่ถูกเผยแพร่ ช่องที่ต้องกรอกถูกทำเครื่องหมายไว้ *
ลิขสิทธิ์ © เจ้อเจียงตงเจิ้งมอเตอร์บจก. สงวนลิขสิทธิ์.
 ผู้ผลิตมอเตอร์เกียร์กระแสตรง
ผู้ผลิตมอเตอร์เกียร์กระแสตรง